Cutlery Classifier
End-to-end ML pipeline for robot gripper.
You can execute our code yourself on Deepnote
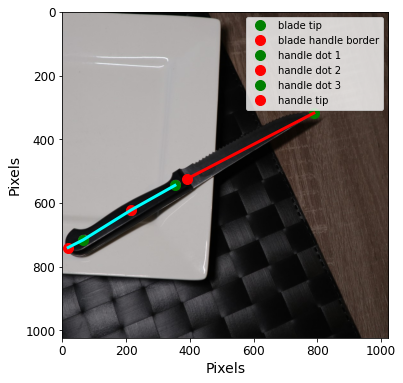
A small robot gripper has to detect cutlery and determine a suitable grip pose. To this end a computer vision pipeline was constructed. We developed an end-to-end machine learning pipeline for a robot gripper tasked with detecting and correctly grasping cutlery. The pipeline begins with data acquisition, where we used custom annotated data. We explored various machine learning models, balancing the need for fast inference in robotics with the accuracy of the predictions. Our approach included comparing classical machine learning methods with modern deep learning techniques to determine the most effective solution. The final model was fine-tuned and tested extensively, with the results documented in a published notebook, which can be executed directly on Deepnote. The project highlights the practical challenges and considerations in applying machine learning to real-world robotics, including data augmentation, feature engineering, and model optimization.
The general ML cookbook looks something like this:
- Overview
- make a plan
- get the data
- representiveness
- need to annotate
- use simulation to obtain data (well suited for reinforcement learning)
- check possibilities for data augmentation data augmentation
- Inspect Data, gain insights
- GOAL: develop intuition
- find outliers
- determine physical meaning
- Prepare data
- GOAL: expose the underlying patterns to the ML algorithm
- how2translate ‘task’ to ‘ML problem’
- Feature selection/ feature engineering
- what do the measurements represent
- data compression
- which variance is informative
- which variance can be removed
- data transforms to deal with:
- missing values
- GOAL: expose the underlying patterns to the ML algorithm
- Explore different models
- for robotics fast inference required as part of control loop
- training time more forgiving
- “more data vs. better model” ROI consideration
- Fine tune your model
- Optimise hyperparameters
- Present your solution
- ensure results are reproducible
- Launch, monitor and maintain your system