3D Sensor Data Fusion
Combining LiDAR and stereo camera pointclouds to build an occupancy grid for navigating an autonomous vehicle.
In this video you can see the occupancy grid which was constructed from the pointcloud data.
For this project the pointcloud data of a LiDAR was fused with the pointclouds obtained from a stereo camera. The data required a lot of preprocessing for it to be usable. First the egomotion of the moving vehicle had to be compensated. Some other challenges were the non-synchronous arrival of the different sensor modalities, or the removal of the ground plane for which the RANSAC algorithm was employed.
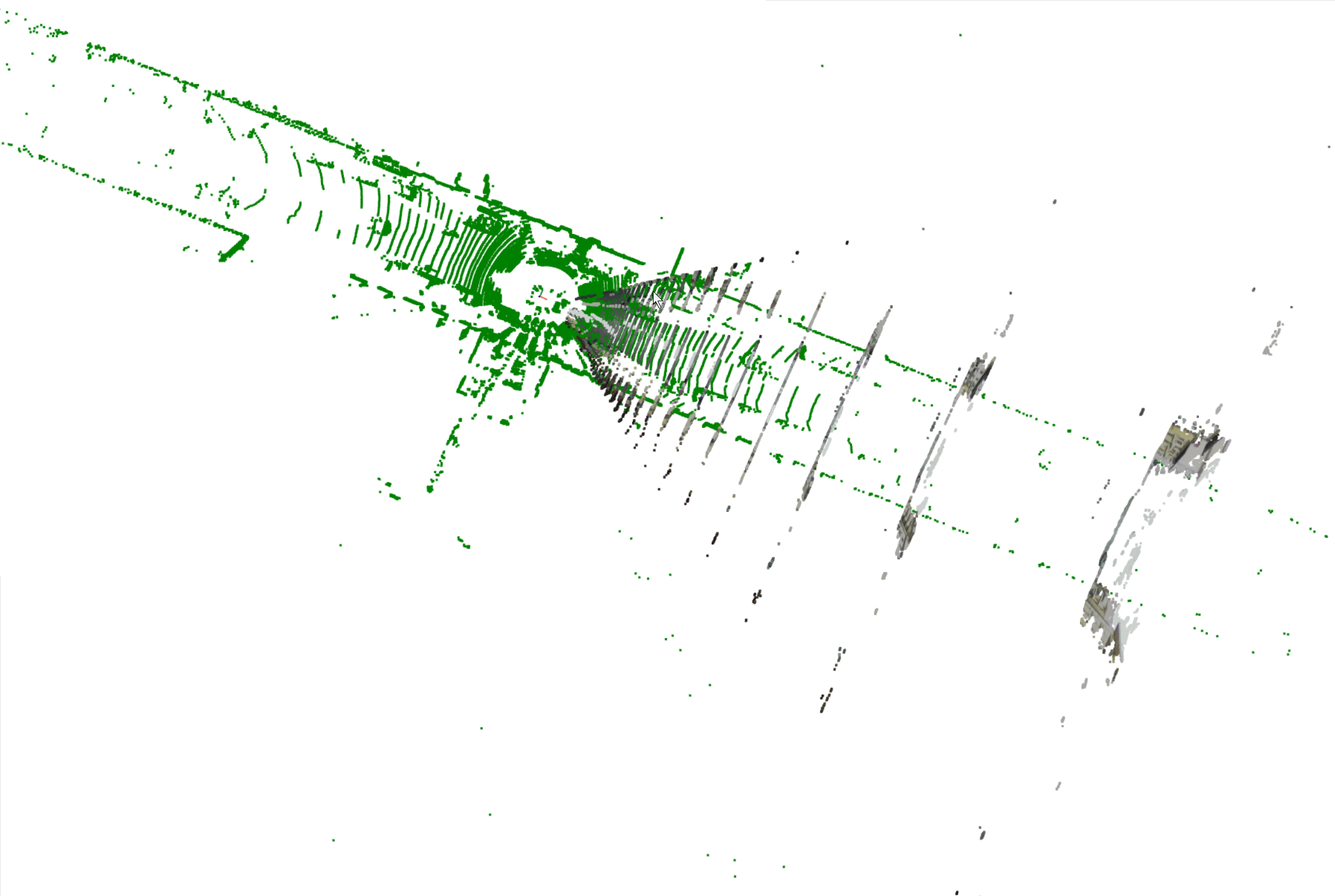
in this image you see the 2 distinct pointclouds. In green the LiDAR pointcloud and in grey (actually RGB) the stereo camera pointcloud.