AI for retail
Utilizing formal knowledge representation and reasoning methods to stock shelves in the supermarket.
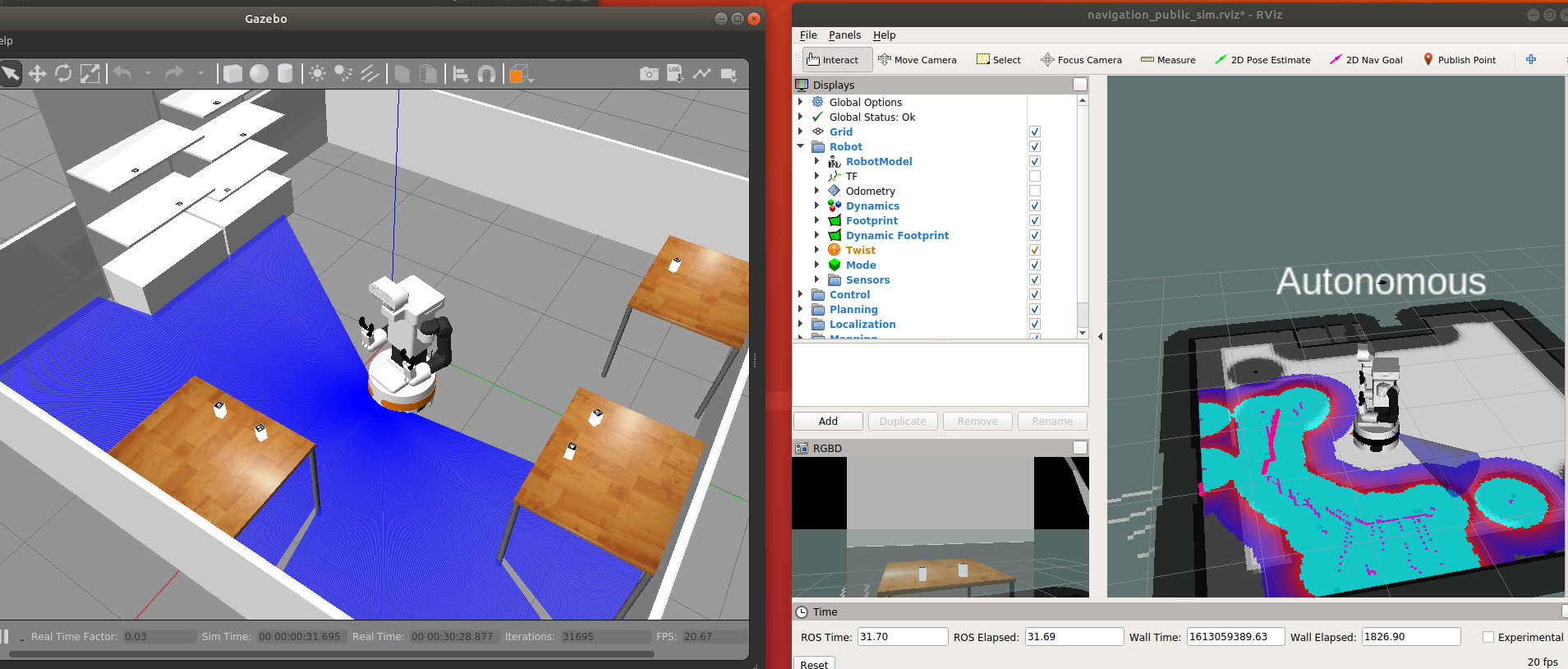
The TU Delft AIRLab simulation with a Tiago robot.
This project involved developing a high level robot controller to automate the task of stocking shelves in supermarkets. Using the Knowrob framework and ROSPlan modules in the Robot Operating System (ROS), we programmed the robot to recognize different products, navigate store aisles, and place items on the correct shelves. We tested our system in a simulated environment of the TU Delft AIRLab with a Tiago robot. The goal was to create a practical, reliable solution for automating inventory management in retail settings.